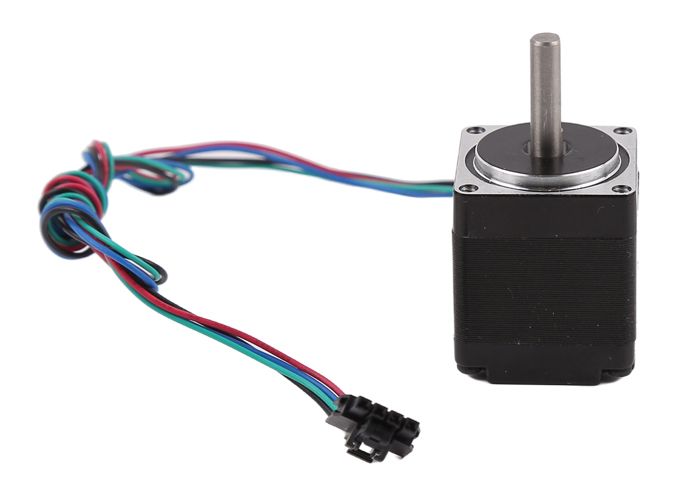
Pauso-motorrakMugimendu diskretuko gailuak dira, servo motorren aldean kostu txikiko abantaila dutenak, energia mekanikoa eta elektrikoa bihurtzen dituzten gailuak dira. Energia mekanikoa energia elektriko bihurtzen duen motorrari "sorgailua" deitzen zaio; energia elektrikoa energia mekaniko bihurtzen duen motorrari "motorra". Pauso-motorrak eta servo motorrak automatizazio-ekipoen mugimendua eta mugitzeko modua zehaztasunez kokatu ditzaketen mugimendu-kontrol produktuak dira, eta batez ere automatizazio-ekipoen fabrikazioan erabiltzen dira.
Hiru pauso-motor mota daude errotorean: erreaktiboa (VR motakoa), iman iraunkorra (PM motakoa) eta hibridoa (HB motakoa). 1) Erreaktiboa (VR motakoa): errotore-hortzak dituen engranajea. 2) Iman iraunkorra (PM motakoa): iman iraunkorra duen errotorea. 3) Hibridoa (HB motakoa): iman iraunkorra eta errotore-hortzak dituen engranajea. Pauso-motorrak estatoreko harilkatzearen arabera sailkatzen dira: bi faseko, hiru faseko eta bost faseko serieak daude. Bi estatore dituzten motorrei bi faseko motor bihurtzen zaizkie eta bost estatore dituztenei bost faseko motor deitzen zaie. Zenbat eta fase eta taupada gehiago izan pauso-motor batek, orduan eta zehatzagoa da.

HB motorrek urrats txikiko mugimendu inkremental oso zehatza lor dezakete, PM motorrek, berriz, ez dute kontrol zehaztasun handirik behar.HB motorrakMugimendu linealaren kontrol-eskakizun konplexu eta zehatzak lor ditzake. PM motorrak nahiko txikiak dira momentuari eta bolumenari dagokionez, oro har ez dute kontrol-zehaztasun handirik behar, eta kostu ekonomikoagoa dute. Industriak: ehungintzako makineria, elikagaien ontziratzea. Ekoizpen-prozesuari eta motorraren kontrol-zehaztasunari dagokionez,HB pauso-motorrakPM pauso-motorrak baino goi-mailakoagoak dira.
Pauso-motorrak eta servo-motorrak mugimendu-kontroleko produktuak dira, baina beren produktu-errendimenduan desberdinak dira. Pauso-motorra mugimendu diskretuko gailu bat da, komando bat jasotzen duena eta urrats bat exekutatzen duena. Pauso-motorrek sarrerako pultsu-seinalea desplazamendu angeluar bihurtzen dute. Pauso-motorren gidariak pultsu-seinalea jasotzen duenean, pauso-motorra bultzatzen du ezarritako norabidean angelu finko batean biratzera. Serbo-motorra servo-sistema bat da, non seinale elektrikoak momentu eta abiadura bihurtzen diren kontrol-objektu bat bultzatzeko, eta horrek abiadura eta posizioaren zehaztasuna kontrola ditzake.
✓ Pauso-motorrak eta servo-motorrak nahiko desberdinak dira maiztasun baxuko ezaugarriei, momentu-maiztasuneko ezaugarriei eta gainkarga-ahalmenari dagokienez.
Kontrol zehaztasuna: zenbat eta fase eta errenkada gehiago izan pauso-motorren mailan, orduan eta zehaztasun handiagoa; AC servomotorren kontrol zehaztasuna motorraren ardatzaren atzealdean dagoen errotazio-kodetzaileak bermatzen du, zenbat eta eskala gehiago izan kodetzaileen mailan, orduan eta zehaztasun handiagoa.
✓ Maiztasun baxuko ezaugarriak: pauso-motorrak maiztasun baxuko bibrazio fenomenoa izateko joera dute abiadura baxuetan, pauso-motorren funtzionamendu-printzipioak zehaztutako maiztasun baxuko bibrazio fenomeno hau kaltegarria da makinaren funtzionamendu normalerako, eta, oro har, moteltze-teknologia erabiltzen dute maiztasun baxuko bibrazio fenomenoa gainditzeko; AC servo sistemek erresonantzia kentzeko funtzioa dute, eta horrek makinariaren zurruntasun falta estal dezake. Funtzionamendua oso leuna da eta ez da bibrazio fenomenorik gertatzen abiadura baxuetan ere.
✓ Momentu-maiztasun ezaugarriak: pauso-motorren irteera-momentua abiadura handitzen den heinean gutxitzen da, beraz, haien funtzionamendu-abiadura maximoa 300-600 RPM da; servo-motorrek momentu nominala eman dezakete abiadura nominalera arte (orokorrean 2000-3000 RPM), eta abiadura nominalaren gainetik potentzia-irteera konstantea da.
✓ Gainkargatzeko gaitasuna: pauso-motorrek ez dute gainkargatzeko gaitasunik; servo-motorrek gainkargatzeko gaitasun handia dute.
✓ Erantzun-errendimendua: pauso-motorrek 200-400 ms behar dituzte geldialditik funtzionamendu-abiadurara azeleratzen (ehunka bira minutuko); AC servoak azelerazio-errendimendu hobea du eta abiarazteko/gelditzeko azkarra behar den kontrol-egoeretan erabil daiteke. Panasonic MASA 400W AC servoak, adibidez, geldialditik 3000 RPM-ko abiadura nominalera azeleratzen du milisegundo gutxitan.
Funtzionamendu-errendimendua: pauso-motorrak begizta irekian kontrolatzen dira, eta maiztasuna altuegia denean edo karga handiegia denean urrats-galera edo blokeoa izateko joera dute, eta abiadura altuegia denean gehiegizko jauzia egiteko joera dute gelditzean; AC servoa begizta itxian kontrolatzen da, eta gidariak motorraren kodetzailearen feedback seinalea zuzenean har dezake lagin gisa, beraz, oro har, ez dago pauso-motorraren urrats-galerarik edo gehiegizko jauziarik, eta kontrol-errendimendua fidagarriagoa da.
AC servoa pauso-motorra baino hobea da errendimenduari dagokionez, baina pauso-motorrak prezio baxuaren abantaila du. AC servoa pauso-motorrak baino hobea da erantzun-abiadurari, gainkarga-ahalmenari eta funtzionamendu-errendimenduari dagokionez, baina pauso-motorrak eszenatoki ez hain zorrotzetan erabiltzen dira, kostu-errendimendu abantaila dutelako. Begizta itxiko teknologia erabiliz, begizta itxiko pauso-motorrek zehaztasun eta eraginkortasun bikaina eman dezakete, eta horrek servo-motorren errendimenduaren zati bat lor dezake, baina prezio baxuaren abantaila ere badu.
Aurrera begiratu eta sortzen ari diren arloak zehaztu. Pauso-motorren aplikazioek egitura-aldaketak izan dituzte, merkatu tradizionala saturaziora iritsi eta industria berriak sortu direlarik. Konpainiaren kontrol-motorrak eta eragingailu-sistemak sakonki ezarrita daude tresna medikoetan, zerbitzu-robotetan, industria-automatizazioan, informazio eta komunikazioan, segurtasunean eta beste industria emergente batzuetan, negozio osoaren zati handi bat hartzen dutenak eta erritmo azkarrean hazten ari direnak. Pauso-motorren eskaria ekonomiarekin, teknologiarekin, industria-automatizazioaren mailarekin eta pauso-motorren garapen teknikoaren mailarekin lotuta dago. Merkatua saturaziora iritsi da bulego-automatizazioan, kamera digitaletan eta etxetresna elektrikoetan bezalako industria tradizionaletan, eta industria berriak sortzen jarraitzen dute, hala nola 3D inprimaketa, eguzki-energia sortzea, ekipamendu medikoa eta automobilgintzako aplikazioak.
| Zelaiak | Aplikazio espezifikoak |
| Bulegoko automatizazioa | Inprimagailuak, eskanerrak, fotokopiagailuak, multifuntzionalak, etab. |
| Eszenatokiko argiztapena | Argiaren norabidearen kontrola, fokua, kolore aldaketa, puntuen kontrola, argiztapen efektuak, etab. |
| Banku-zerbitzuak | Kutxazain automatikoak, fakturak inprimatzeko makinak, banku-txartelen ekoizpena, dirua zenbatzeko makinak, etab. |
| Medikuntza | CT eskanerra, hematologia analizatzailea, biokimika analizatzailea, etab. |
| Industriala | Ehun-makineria, ontziratzeko makinak, robotak, garraiatzaileak, muntaketa-lerroak, kokapen-makinak, etab. |
| Komunikazioa | Seinaleen egokitzapena, antena mugikorren kokapena, etab. |
| Segurtasuna | Zaintza-kameretarako mugimendu-kontrola. |
| Automobilgintza | Petrolio/gas balbularen kontrola, zuzendaritza sistema arina. |
Industria emergentea 1: 3D inprimaketak aurrerapenak egiten jarraitzen du I+G teknologian eta aplikazio eszenatokiak zabaltzen ditu beheranzko sektorean, barneko eta nazioarteko merkatuak % 30 inguruko hazkunde-tasan haziz. 3D inprimaketa modelo digitaletan oinarritzen da, materialak geruzaz geruza pilatuz objektu fisikoak sortzeko. Motorra 3D inprimagailuaren potentzia-osagai garrantzitsua da, motorraren zehaztasunak 3D inprimaketaren efektuan eragiten du, oro har, 3D inprimaketak pauso-motorrak erabiliz egiten du. 2019an, 3D inprimaketa-industriaren eskala globala 12.000 milioi dolarrekoa izan zen, aurreko urteko aldi beraren aldean % 30eko igoera.

2. industria emergentea: Robot mugikorrak ordenagailuz kontrolatzen dira, eta mugimendua, nabigazio automatikoa, sentsore anitzeko kontrola, sareko elkarrekintza eta abar bezalako funtzioak dituzte. Ekoizpen praktikoan erabilera garrantzitsuena manipulazioa da, estandarizazio maila altua ez duena.
Urrats-motorrak robot mugikorren gidatze-moduluan erabiltzen dira, eta gidatze-egitura nagusia gidatze-motorrez eta erredukzio-engranajeez (engranaje-kaxez) muntatzen da. Bertako industria-robotaren industria atzerriko herrialdeekin alderatuta berandu hasi bazen ere, atzerriko herrialdeen aurretik dago robot mugikorren arloan. Gaur egun, robot mugikorren osagai nagusiak batez ere barnean ekoizten dira, eta bertako enpresek funtsean zehaztasun-eskakizunak bete dituzte alderdi guztietan, eta atzerriko enpresa lehiakide gutxiago daude.

Txinako robot mugikorren merkatuaren tamaina 6.200 milioi dolar ingurukoa izango da 2019an, aurreko urtearekin alderatuta % 45eko igoera. Garbiketa-robot profesionalen nazioarteko merkaturatzea, garbiketa-eraginkortasuna nabarmen handituz. "Bigarren robotaren" merkaturatzea 2018an humanoide robotaren merkaturatzearen ondoren dator. "Bigarren robota" xurgagailu robot komertzial adimenduna da, oztopoak, eskailerak eta gizakien mugimendua detektatzeko hainbat sentsore dituena. Hiru orduz funtziona dezake karga bakarrarekin eta 1.500 metro koadro arte garbitu ditzake. "Bigarren robotak" garbiketa-langileen eguneroko lan-karga gehiena ordezkatu dezake eta xurgagailuaren eta garbiketaren maiztasuna handitu dezake, dauden garbiketa-lanez gain.
Industria emergentea 3: 5G sartzearekin batera, komunikazio-oinarri-estazioetarako antena kopurua handitzen ari da, eta behar diren motorren kopurua ere handitzen ari da. Oro har, 3 antena behar dira ohiko komunikazio-oinarri-estazioetarako, 4-6 antena 4G oinarrizko estazioetarako, eta 5G aplikazioetarako oinarrizko estazioen eta antenen kopurua ere handitzen da, telefono mugikorren komunikazio tradizionala eta IoT komunikazio-aplikazioak estali behar baitituzte. Engranaje-kaxak dituzten kontrol-motor produktuak garapen pertsonalizatu nagusi bihurtzen ari dira oinarrizko estazioen antena-lantegietarako. Engranaje-kaxa duen kontrol-motor bat erabiltzen da ESC antena bakoitzerako.
4G oinarrizko estazioen kopurua 1,72 milioi handitu zen 2019an, eta 5Gren eraikuntzak ziklo berri bat irekitzea espero da. 2019an, Txinako telefono mugikorren oinarrizko estazioen kopurua 8,41 milioira iritsi zen, eta horietatik 5,44 milioi 4G oinarrizko estazioak ziren, hau da, % 65. 2019an, 4G oinarrizko estazio berrien kopurua 1,72 milioi handitu zen, 2015etik gehien, batez ere 1) landa-eremuetako puntu itsuak estaltzeko sarearen hedapenari esker. 2) 5G sarearen eraikuntzaren oinarriak ezartzeko, sare nagusiaren gaitasuna berrituko da. Txinako 5G merkataritza-lizentzia 2019ko ekainean emango da, eta 2020ko maiatzerako, 250.000 5G oinarrizko estazio baino gehiago irekiko dira estatu osoan.
5. Industria Emergentea: Gailu medikoak pauso-motorren aplikazio-eszenatoki nagusietako bat dira eta Vic-Tech sakonki inplikatuta dagoen segmentuetako bat dira. Metaletik plastikora, gailu medikoek zehaztasun-maila handia behar dute ekoizpenean. Gailu medikoen fabrikatzaile askok servomotorrak erabiltzen dituzte zehaztasun-eskakizunak betetzeko, baina pauso-motorrak servoak baino ekonomikoagoak eta txikiagoak direnez, eta zehaztasunak gailu mediko batzuk bete ditzakeenez, pauso-motorrak gailu medikoen fabrikazio-industrian erabiltzen dira eta baita servomotor batzuk ordezkatzen ere.

Argitaratze data: 2023ko maiatzaren 19a